Y-MIC-12xx
Additional Proof for Precision, Dynamics, and Suitability for Vacuum
- Measurement of position, pitch, yaw, straightness, and flatness
- Dynamic measurement of the minimum incremental motion and velocity
- High and ultrahigh vacuum measurement (HV & UHV), in up to 240 l chambers


Individual and detailed test setup
Upon request, additional measurements can be performed at PI in order to determine in detail the performance values of the products and to verify these individually. This allows the necessary measurement data to be compiled and individually documented for the specific application using different parameters.
Additional measurements for precision, geometry, and dynamics
Interferometers can be used to measure and individually verify product surfaces as well as dynamics and motion profiles of combined products.
Additional measurements in a vacuum environment
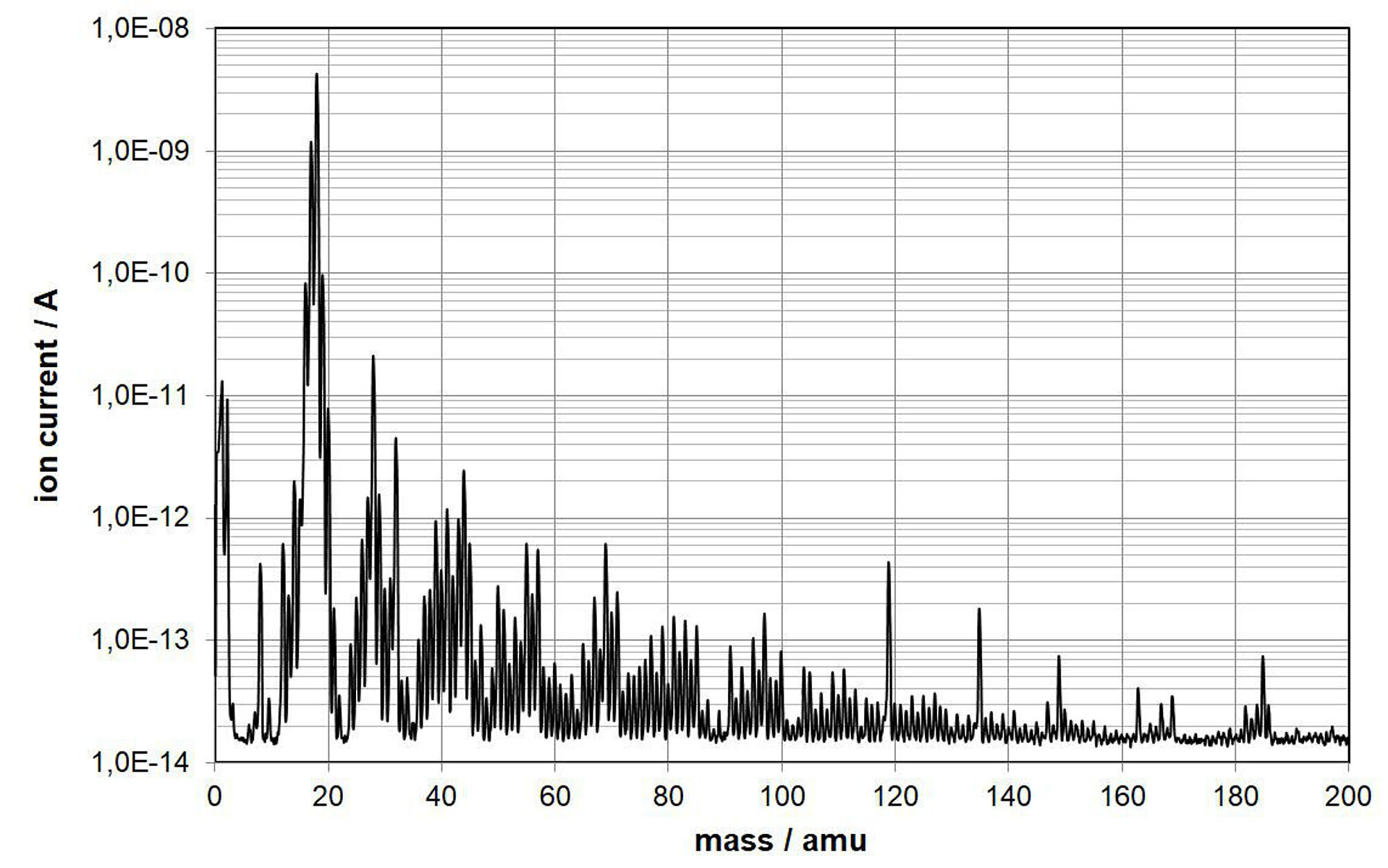
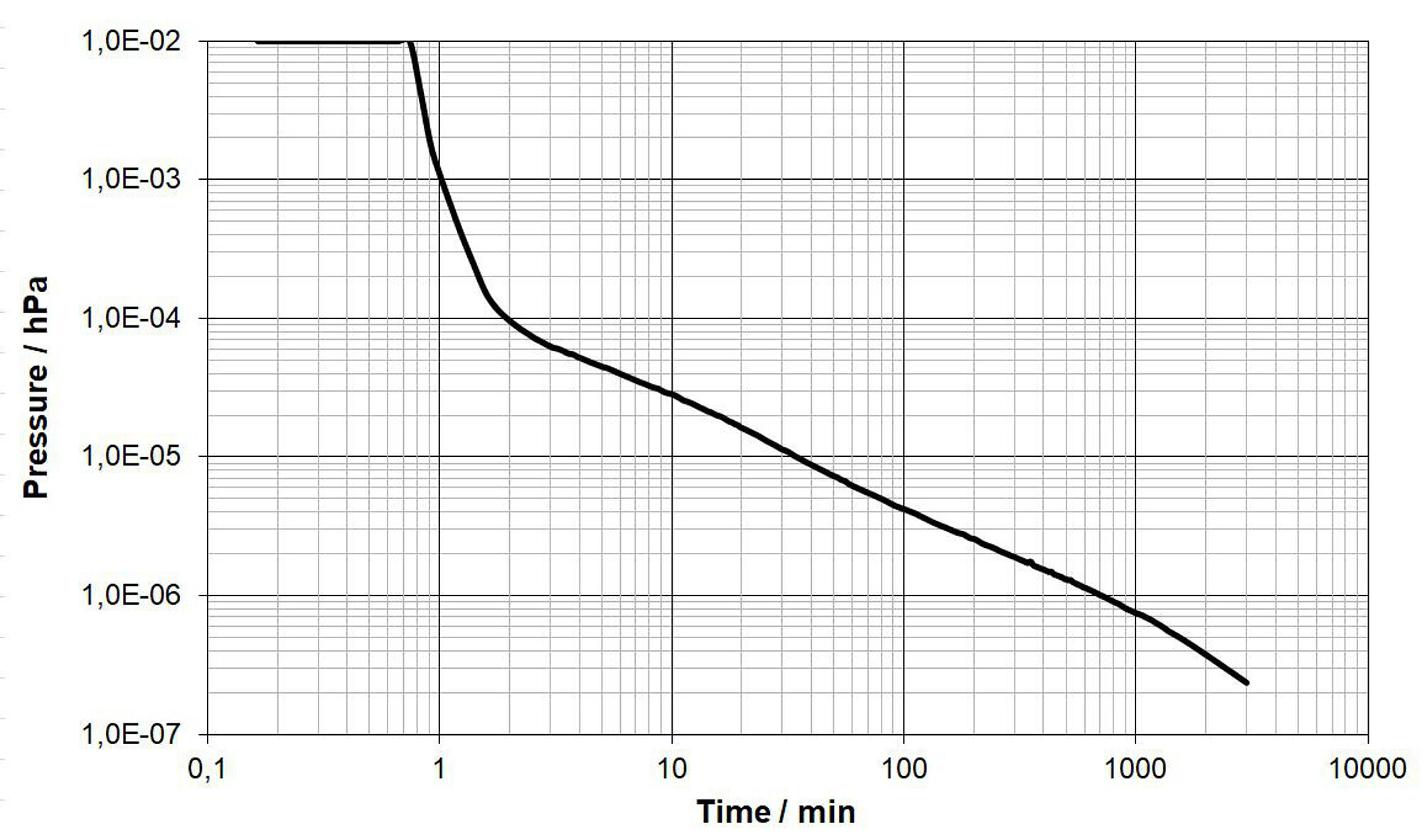
For products suitable for vacuum, residual gas analyses (RGA) can be performed in vacuum chambers with a volume of 10 l or 240 l. For this purpose, the pressure in the chamber is recorded during the entire test. The RGA (0 - 200 amu) is performed at the end of the test. The pressure curve of the individual phases (pumping down, bakeout, cooling down) as well as the RGA spectrum are provided as a result. Upon request, additional RGA spectra, e.g. after pumping down or after bakeout, can be recorded.
Measurement logs are only available for specific products. For more information, contact our customer service department.
Specifications
This content is only available on tablets or desktop devices.Specifications
| Drive type | DC motor | Stepper motor | ||||||
|---|---|---|---|---|---|---|---|---|
| Spindle pitch [mm] | 1 | 2 | 5 | 1 | 2 | 5 | ||
| Maximum velocity in X, unloaded [mm/s] | 50 | 100 | 250 | 20 | 40 | 100 | ||
| Acceleration [m/s2] | 0.9 | 1.7 | 3.5 | 0.7 | 1.4 | 3.2 | ||
| Minimum incremental motion in X (max.) [µm] | Encoder | 1Vpp | 0.05 | 0.1 | 0.2 | 0.05 | 0.1 | 0.2 |
| RS-242 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | ||
| Rot. | 2 | 5 | 10 | |||||
| None | 2 | 5 | 10 | |||||
| Unidirectional repeatability in X (max.) [µm] | Encoder | 1Vpp | 0.5 | 0.5 | 1 | 0.5 | 0.5 | 1 |
| RS-242 | 0.5 | 0.5 | 1 | 0.5 | 0.5 | 1 | ||
| Rot. | 2 | 2 | 5 | |||||
| None | 5 | 5 | 10 | |||||
| Bidirectional repeatability in X (max.) [µm] | Encoder | 1Vpp | 1 | 1 | 2 | 1 | 1 | 2 |
| RS-242 | 1 | 1 | 2 | 1 | 1 | 2 | ||
| Rot. | 5 | 5 | 10 | |||||
| None | 10 | 10 | 20 | |||||
| Drive type | DC motor | Stepper motor | ||||||
| Spindle pitch [mm] | 1 | 2 | 5 | 1 | 2 | 5 | ||
| Drive force in direction of motion in X [N] | 100 | 50 | 20 | 100 | 100 | 40 | ||
| Holding force in X, passive [N] | 50 | 40 | 20 | |||||
| Permissible force in Z [N] | 100* | 100* | 100* | 100* | 100* | 100* | ||
| Permissible force in Y [N] | 100 | 100 | 100 | 100 | 100 | 100 | ||
| Permissible force in X [N] | 100 | 50 | 20 | 100 | 100 | 40 | ||
| Permissible torque in θX [Nm] | 30 | 30 | 30 | 30 | 30 | 30 | ||
| Permissible torque in θY [Nm] | 20 | 20 | 20 | 20 | 20 | 20 | ||
| Permissible torque in θZ [Nm] | 20 | 20 | 20 | 20 | 20 | 20 | ||
| Holding brake | Optional for DC motor. Holding force 50 N. | |||||||
| Drive screw type | Ball screw drive | |||||||
| Guide | Recirculating linear ball bearing | |||||||
| Moved Mass [g] | Depends on configuration | |||||||
| Travel range in X [mm] | 50 | 100 | 150 | 200 | 250 | 300 | ||
| Flatness (linear crosstalk in Z with motion in X) [µm] | 5 | 7 | 9 | 10 | 11 | 12 | ||
| Straightness (linear crosstalk in Y with motion in X) [µm] | 5 | 7 | 9 | 10 | 11 | 12 | ||
| Yaw (rotational crosstalk in θZ with motion in X) [µrad] | 100 | 150 | 175 | 200 | 225 | 250 | ||
| Pitch (rotational crosstalk in θY with motion in X( [µrad] | 100 | 150 | 175 | 200 | 225 | 250 | ||
| Integrated sensor | Linear encoder | Linear encoder | Rotational encoder | Open loop | ||||
| Sensor signal | 1 Vpp | RS-422 | RS-422 | None | ||||
| Sensor resolution | Depends on controller setting | 80 nm | 1024 pulses per revolution | |||||
| Sensor signal period | 80 µm | 80 µm | 6.136 µrad | |||||
| Reference switch | Reflective optical sensor | Reflective optical sensor | Index pulse of magnetic encoder | |||||
| Reference switch repeatability | 1 µm | |||||||
| Internal limit switches | Hall-effect switch | |||||||
| Internal limit switch repeatability | 1 μm | |||||||
| External limit switches | Inductive proximity sensor | |||||||
| External limit switches repeatability | 40 μm | |||||||
| Stiffness in X [N/μm] | 5 | |||||||
| Stiffness in Y [N/μm] | 5 | |||||||
| Stiffness in Z [N/μm] | 5 | |||||||
| Stiffness in θX [μrad/Nm] | 20 | |||||||
| Stiffness in θY [μrad/Nm] | 25 | |||||||
| Stiffness in θZ [μrad/Nm] | 20 | |||||||
| Integrated Sensor | Linear Encoder | Linear Encoder | ||||||
| Drive Type | DC Motor | Stepper Motor | ||||||
| Nominal voltage [V] | 24 | 24 | ||||||
| Peak voltage [V] | 24 | 24 | ||||||
| Nominal current, RMS [A] | 1.69 | 1 | ||||||
| Peak current, RMS [A] | 8.18 | |||||||
| Motor resolution [Steps/rev.] | 200 | |||||||
| Torque constant [mNm/A] | 36.9 | |||||||
| Resistance phase-phase [Ohm] | 2.85 | 5.3 | ||||||
| Inductance phase-phase [mH] | 0.373 | 12.5 | ||||||
| Back EMK, rotational [V/kRPM] | 4 | 48 | ||||||
| Number of pole pairs | 1 | |||||||
| Motor constant, rotational [mNm/A] | 36.9 | |||||||
| Material | Aluminium, steel, and more | |||||||
| Sensor connector | HD D-Sub 26 (m) | |||||||
| Motor connector | HD D-Sub 26 (m) | |||||||
| Recommended controllers/drivers | C-863 (DC, RS422)C-663 (2SM, RS422)Modular ACS-ControllerBeckhoff Terminals | |||||||
| Operating temperature | 10 °C to 50 °C | |||||||
| Storage temperature | 0 °C to 70 °C | |||||||
| Transport temperature | 0 °C to 70 °C | |||||||
| Air pressure | 80 kPa to 110 kPa | |||||||
| Maximum altitude | 2000 m | |||||||
| Protection class | IP20 | |||||||
| Travel range | 50 | 100 | 150 | 200 | ||||
| Gewicht von bis je nach Ausstattung | 1.9 | 2.18 | 2.13 | 2.41 | 2.37 | 2.6 | 2.6 | 2.89 |
| Item | Model No. (note 2) | Type | NPN output | PNP output | ||||
| Front sensing | GX-F8A(I) | GX-F8B(I) | GX-F8A(I)-P | GX-F8A(I)-p | ||||
| Top sensing | GX-H8A(I) | GX-H8B(I) | GX-F8A(I)-P | GX-F8A(I)-p | ||||
| Max operation distance (Note 3) | 2.5 mm (0.008 in) ± 8 % | |||||||
| Stable sensing range (Note 3) | 0 to 2.1 mm (0 to 0.083 in) | |||||||
| Standard sensing object | Iron sheet 15 × 15 × t 1 mm (0.591 × t 0.039 in) | |||||||
| Hysteresis | 20 % or less of operation distance (with standard sensing object) | |||||||
| Repeatability | Along sensing axis, perpendicular ti sensing axis: 0.04 mm (0.0016 in) or less | |||||||
| Supply voltage | 12 to 24 V DC +10 %/-15 % Ripple P-P 10 % or less | |||||||
| Current consumption | 15 mA or less | |||||||
| Output |
NPN open-collector transistor
|
PNP open-collector transistor
| ||||||
| Utilization Category | DC-12 or DC-13 | |||||||
| Output operation | Normally open | Normally closed | Normally open | Normally closed | ||||




