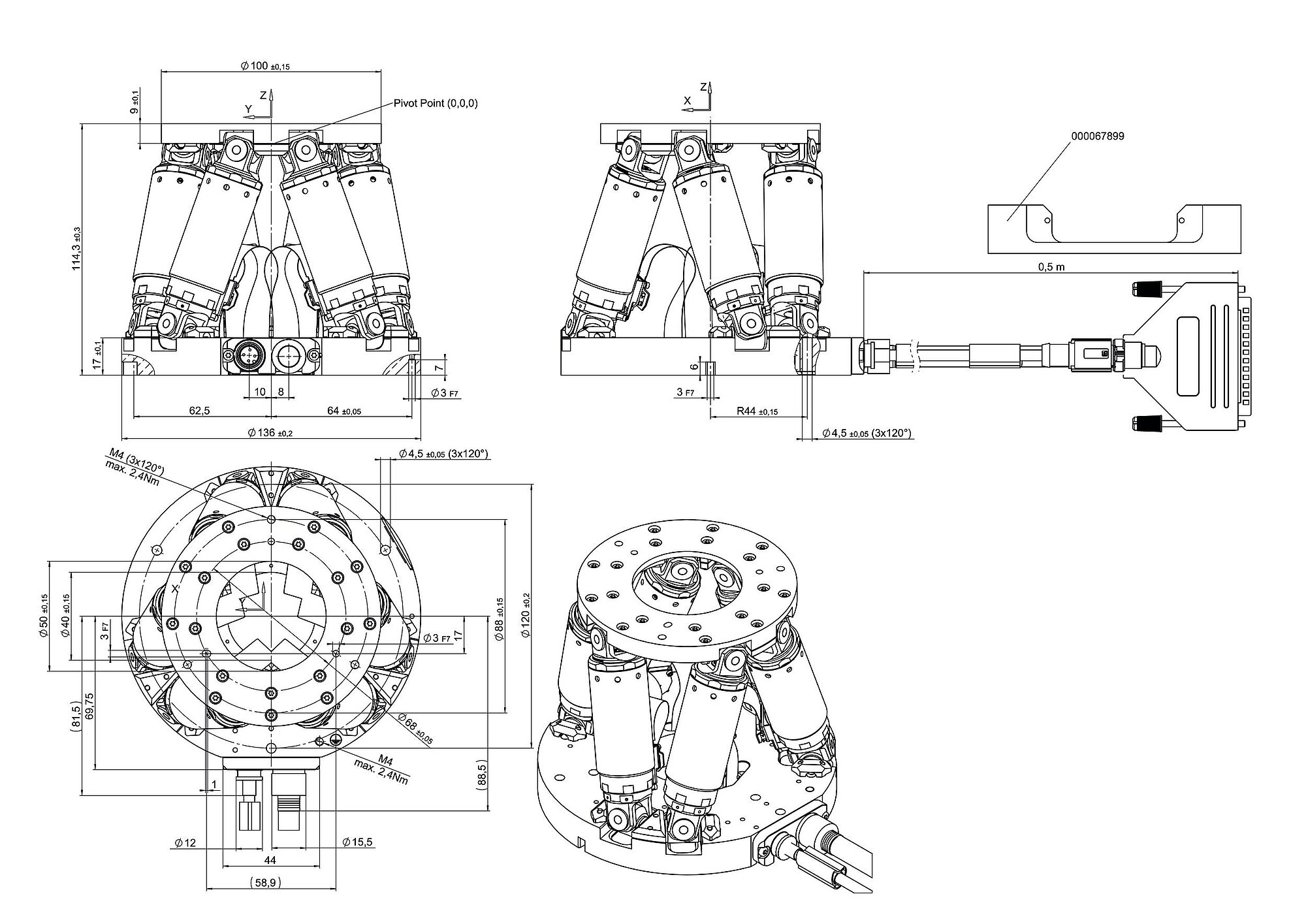
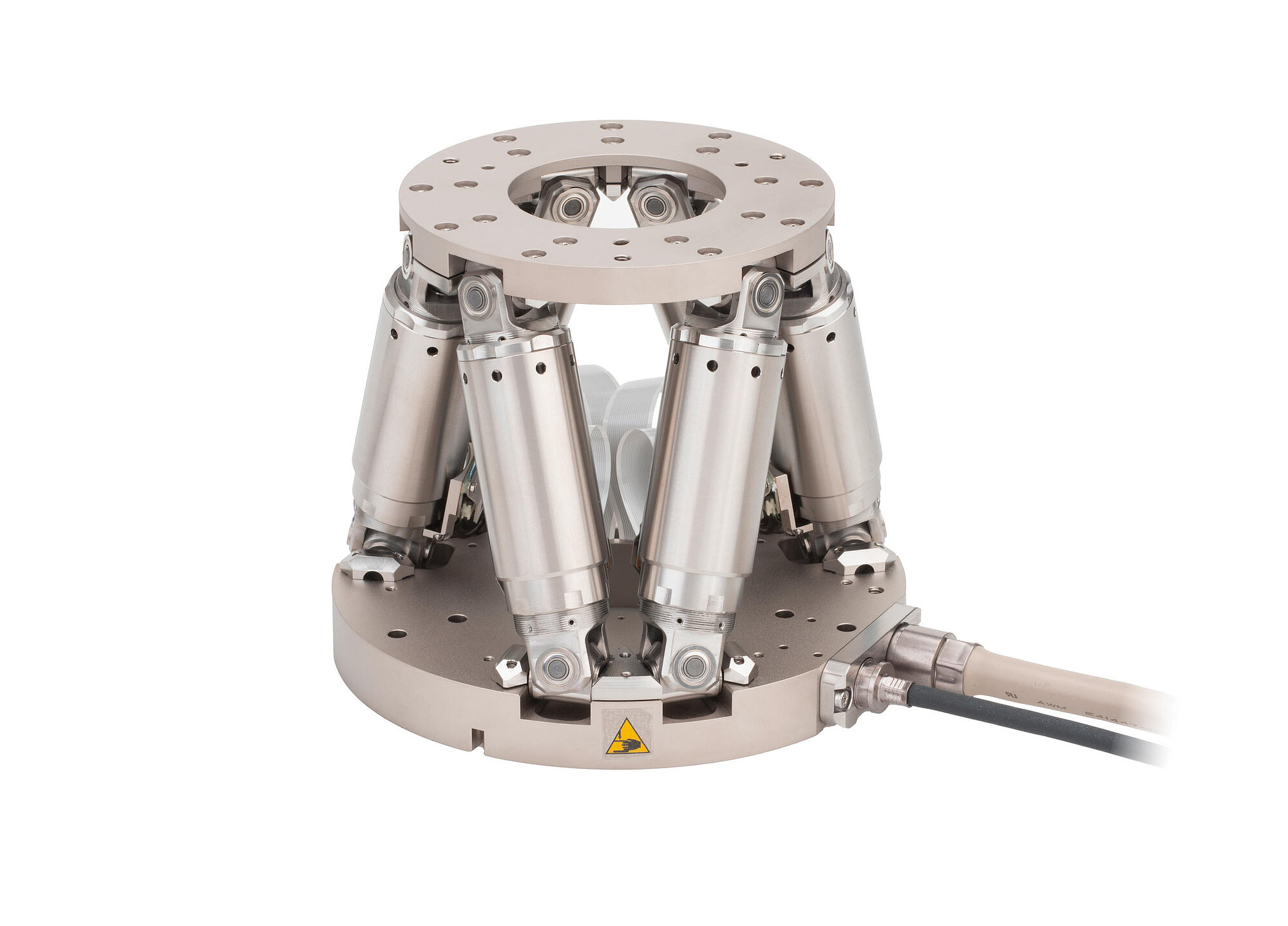
H-811.I2 Miniature Hexapod
Fast, Compact, and Highly Precise
- Travel ranges to ±17 mm / ±21°
- Payload to 5 kg
- Repeatability to ±0.06 µm
- Velocity to 20 mm/s
- Vacuum model available








Application fields
Thanks to its small footprint and its proven reliability in applications with high numbers of cycles, the H-811 is typically employed in photonics and in precision assembly. In such areas, it contributes to boosting the productivity of complex manufacturing processes and measuring procedures.
High dynamics combined with extreme reliability
The parallel-kinematic arrangement enables the hexapod to perform motion in 6 axes in an extremely compact design. Thanks to the use of brushless DC motors and its stiff mechanical design, the H-811 offers the dynamics required for active alignment applications, even if external interference (e.g., in the case of gluing processes) occurs. Extensive software tools provide support by simplifying the system tuning and making automatic routines available for alignment to an external analog control signal.
Motion simulation for protecting the overall system
The PIVirtualMove software, which can be downloaded free of charge, simulates the travel range, the alignment, and the permissible forces and torques of the H-811 to facilitate an optimum system configuration. In this context, both the chosen center of rotation and the center of gravity of the load are taken into consideration.
Work and tool coordinate systems and an emulation tool are included in the free software package belonging to the scope of delivery of the hexapod controller. The tools provided help to protect critical components such as optical or photonic parts.
Specifications
Specifications
| Travel range [mm] | 50, 100, 150, 200, 250, or 300 | |||||||
|---|---|---|---|---|---|---|---|---|
| Drive type | DC motor | Stepper motor | ||||||
| Spindle Pitch [mm] | 1 | 2 | 5 | 1 | 2 | 5 | ||
| Maximum velocity in X, unloaded [mm/s] | ||||||||
| Acceleration [mm/s²] | ||||||||
| Minimum incremental motion in X [nm] | Encoder | 1 V pp | ||||||
| RS-422 | ||||||||
| Rot. | ||||||||
| None | ||||||||
| Unidirectional repeatability in X [µm] | Encoder | 1 V pp | ||||||
| RS-422 | ||||||||
| Rot. | ||||||||
| None | ||||||||
| Bidirectional repeatability in X [µm] | Encoder | 1 V pp | ||||||
| RS-422 | ||||||||
| Rot. | ||||||||
| None | ||||||||
| Sensor resolution [µm] | Encoder | 1 V pp | ||||||
| RS-422 | ||||||||
| Rot. | ||||||||
| None | ||||||||
| Drive force in direction of motion in X [N] | ||||||||
| Holding force in X, passive [N] | ||||||||
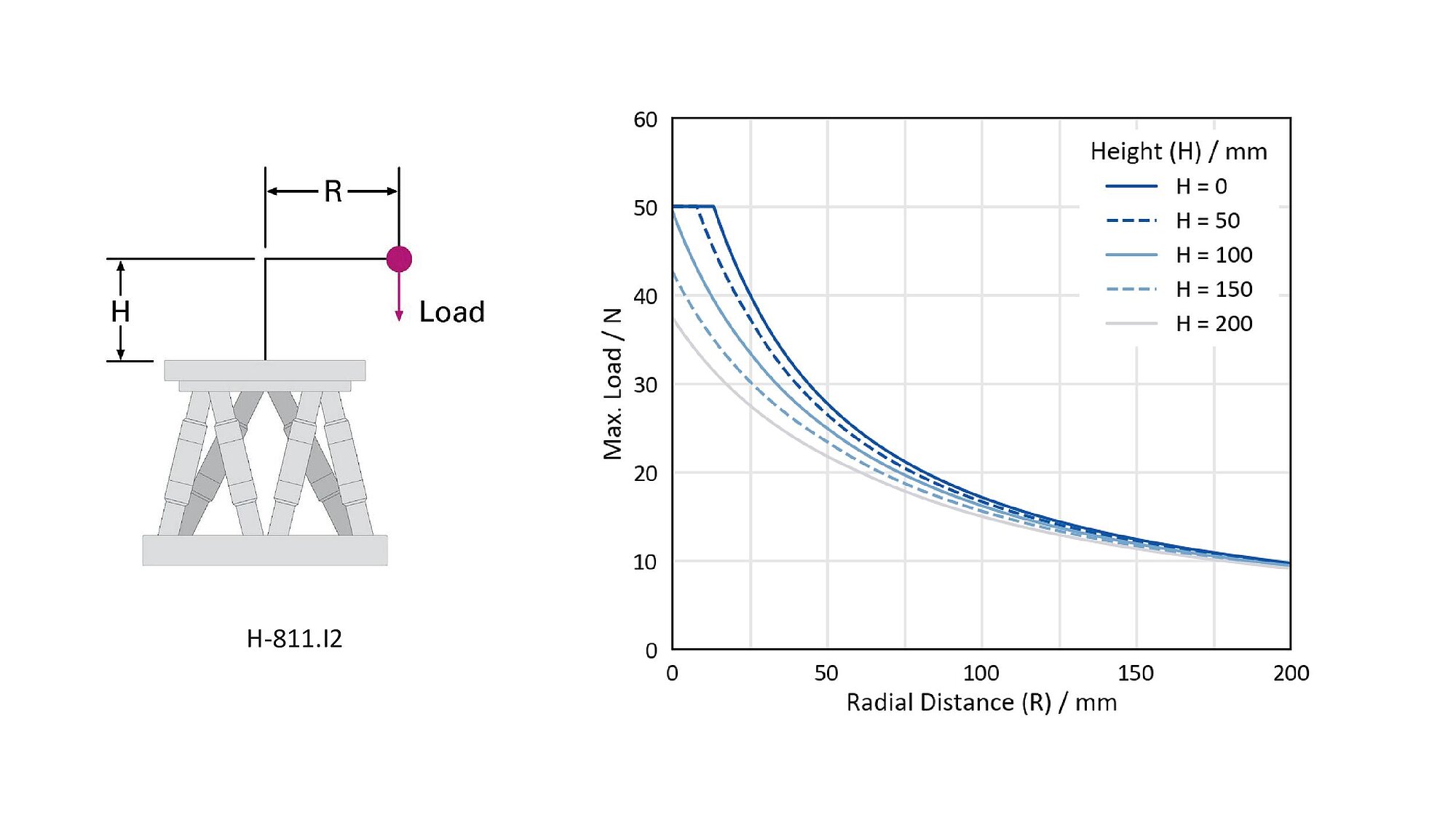
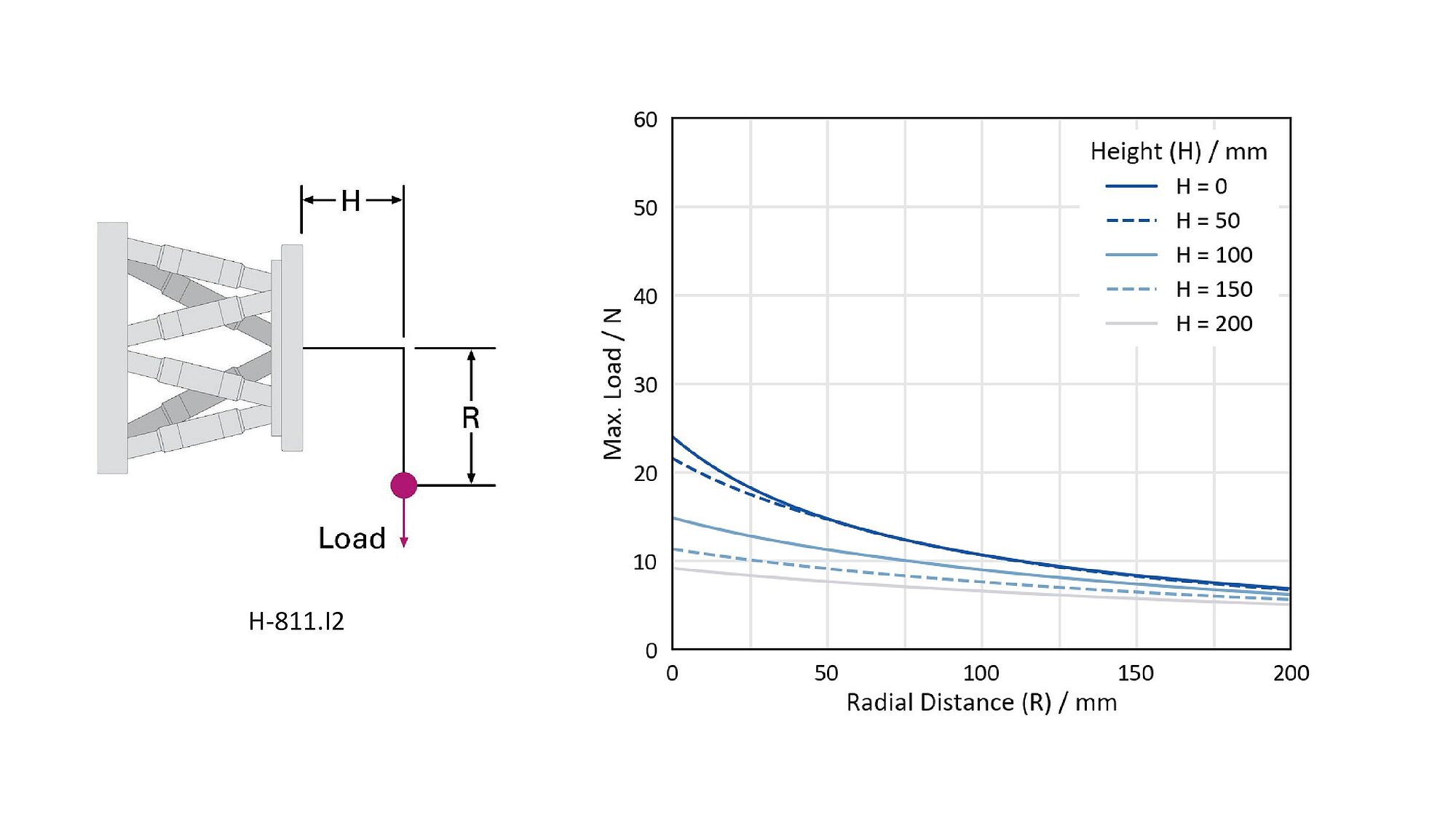
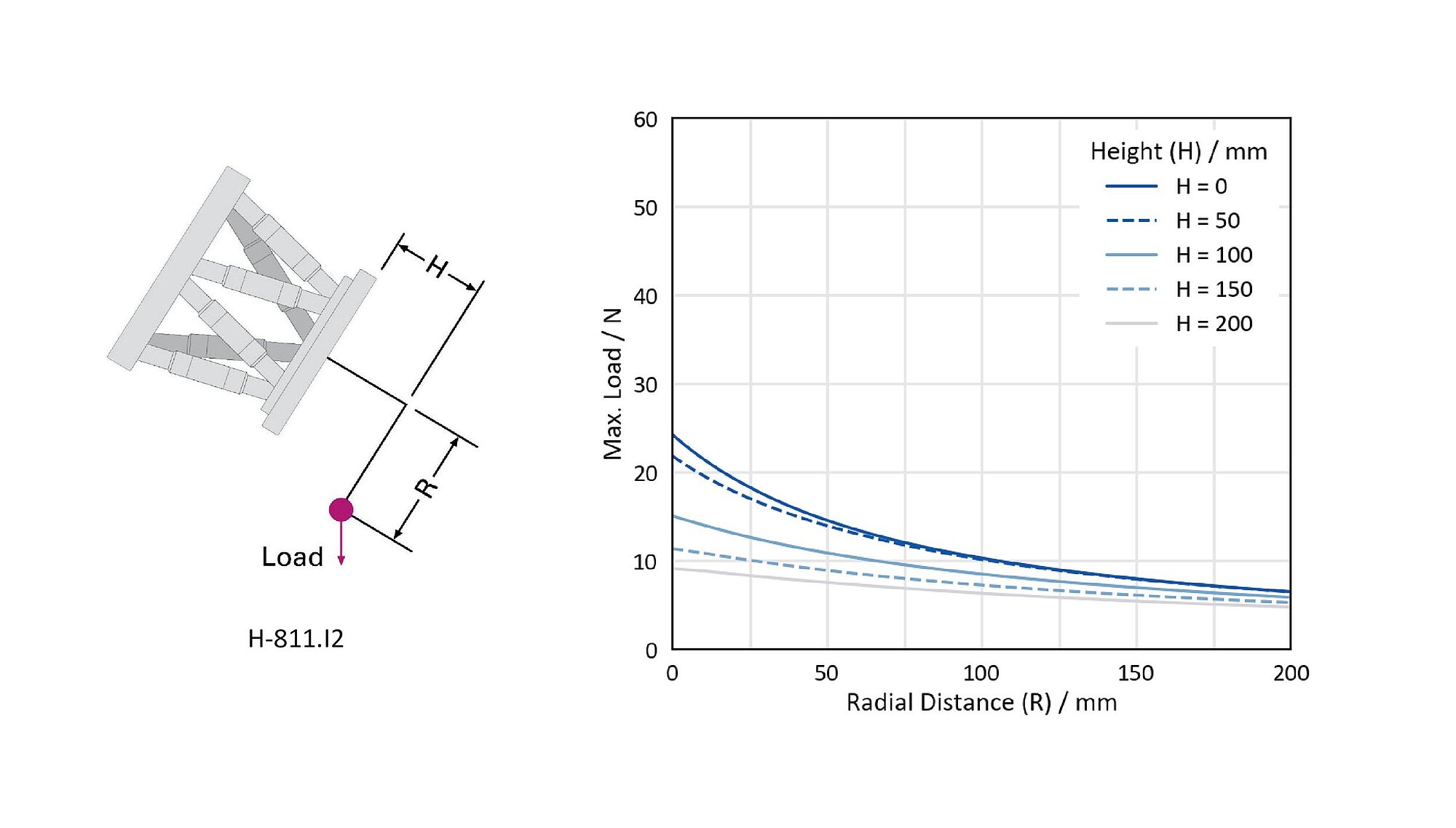
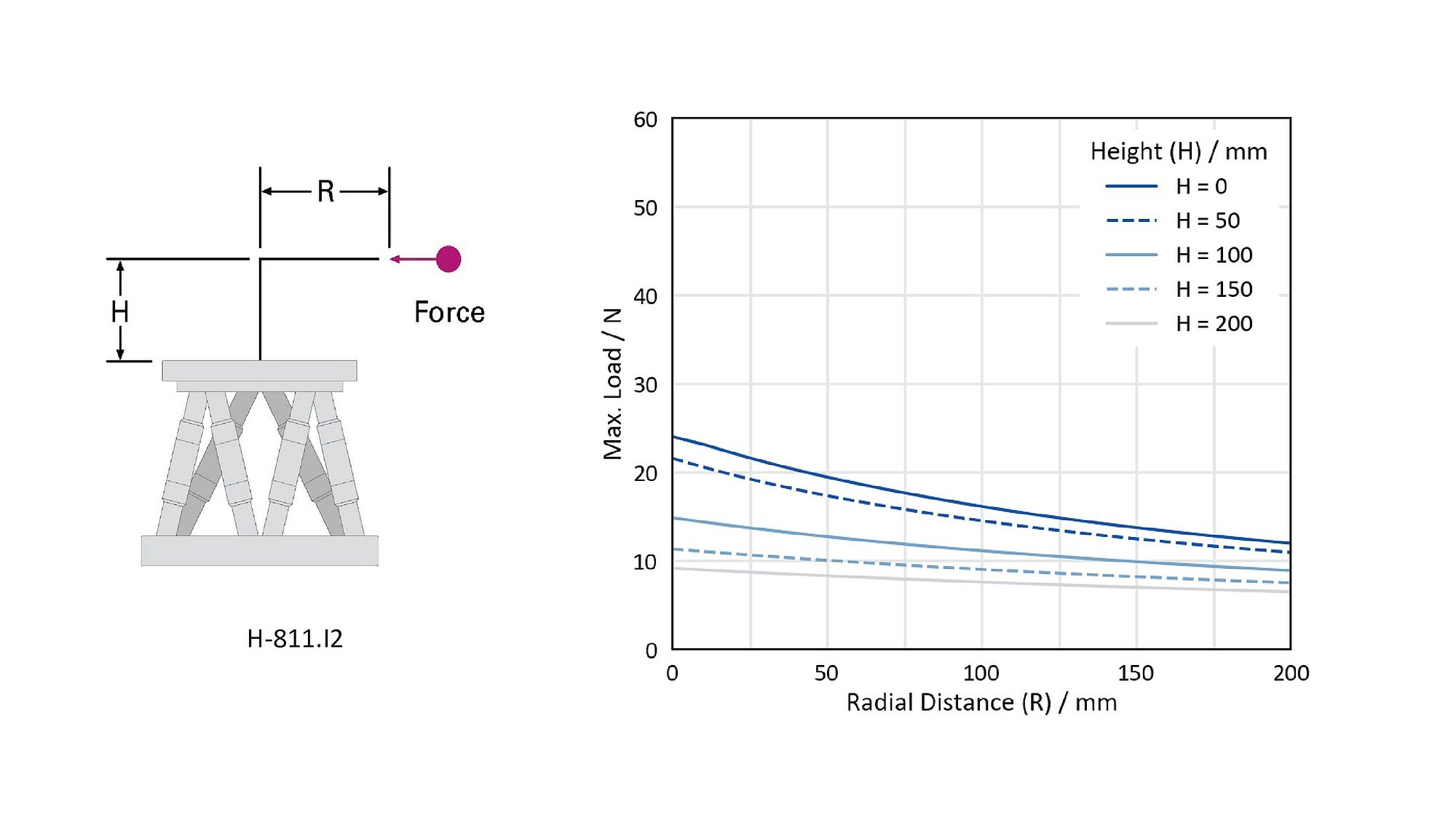
| Permissible force in X [N] | ||||||||
| Permissible force in Y [N] | ||||||||
| Permissible torque in θX [Nm] | ||||||||
| Permissible torque in θY [Nm] | ||||||||
| Permissible torque in θZ [Nm] | ||||||||
| Permissible force in Z [N] | ||||||||
| Travel range in X [mm] | 50 | 100 | 150 | 200 | 250 | 300 | ||
| Flatness (linear crosstalk in Z with motion in X) [µm] | ||||||||
| Straightness (linear crosstalk in Y with motion in X) [µm] | ||||||||
| Yaw (rotational crosstalk in θZ with motion in X) [µrad] | ||||||||
| Pitch (rotational crosstalk in θY with motion in X( [µrad] | ||||||||
| Holding brake | Optional for DC motor – holding force XY | |||||||
| Drive screw type | ||||||||
| Guide | ||||||||
| Connector | ||||||||
| Operating temperature range | ||||||||
| Degree of protection | ||||||||
| Recommended controllers/drivers |
| |||||||
| Crosstalks | ||||||||
| Travel range in X [mm] | 50 | 100 | 150 | 200 | 250 | 300 | ||
| Flatness (linear crosstalk in Z with motion in X) [µm] | ||||||||
| Straightness (linear crosstalk in Y with motion in X) [µm] | ||||||||
| Yaw (rotational crosstalk in θZ with motion in X) [µrad] | ||||||||
| Pitch (rotational crosstalk in θY with motion in X) [µrad] | ||||||||
Downloads
Product Note
Product Change Notification Hexapod Cables
Product Change Notification Motor Driven Products
Product Change Notification H-811 Series
Product Change Notification H-811 Vent Holes
Product Change Notification H-811.D2, H-811.D11, H-811.D12
Datasheet
Documentation
User Manual MS235
H-811 Miniature Hexapods
3D Models
H-811.I2 3D Model
Software Files
PIVirtualMove
How to Get a Quote















Applications
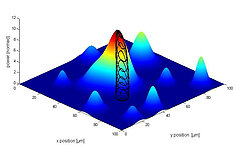
SiPh Testing, Assembly, and Packaging
When it comes to throughput and production costs in testing, assembling, and packaging of photonic devices, alignment is one of the most significant cost factors. For maximum performance, the optimal combination of accuracy, speed, and intelligent automation is needed.

Sample Adjustment
At Diamond Light Source, UK, beamline I07 is a high-resolution X-ray diffraction beamline dedicated to investigate the structure of surfaces and interfaces.

High Vacuum Positioning
Investigation of the structural properties of thin films under high-vacuum conditions.

Nanotomography
At the X-ray light source PETRA III at the DESY research center in Hamburg operates the Imaging Beamline P05.
Dimensional Measuring
Hexapods allow for an outstanding flexibility for a variety of samples of in-line automation systems by minimizing the space for motion robotics.